Behavior Planning Engineer with a Ph.D. in Artificial Intelligence and Machine Learning, specializing in adaptive planning and decision-making for autonomous systems. Experienced in behavior trees, reinforcement learning, and heuristic search for intelligent maneuver planning.
Developed and integrated advanced planning algorithms on platforms such as Apollo Auto and CommonRoad. Committed to bridging cutting-edge research with real-world deployment to advance safe and reliable autonomous driving technologies.
I successfully defended my doctoral thesis entitled “Development and Research of Adaptive Planning Algorithms and Methods for Autonomous Vehicle Maneuvers.”
In safety-critical systems such as autonomous driving systems, behavior planning is a significant challenge. The presence of numerous dynamic obstacles makes the driving environment unpredictable. The planning algorithm should be safe, reactive, and adaptable to environmental changes. The paper presents an adaptive maneuver planning algorithm based on an evolving behavior tree created with genetic programming. In addition, we make a technical contribution to the Baidu Apollo autonomous driving platform, allowing the platform to test and develop overtaking maneuver planning algorithms.
@inproceedings{jamal2021adaptive,title={Adaptive maneuver planning for autonomous vehicles using behavior tree on apollo platform},author={Jamal, Mais and Panov, Aleksandr},booktitle={Artificial Intelligence XXXVIII},publisher={Springer, Cham},address={Cham},volume={13101},pages={327--340},year={2021},isbn={978-3-030-91100-3},doi={10.1007/978-3-030-91100-3_26},url={https://link.springer.com/chapter/10.1007/978-3-030-91100-3_26},}
FFStreams_RAL
FFStreams: Fast Search with Streams for Autonomous Maneuver Planning
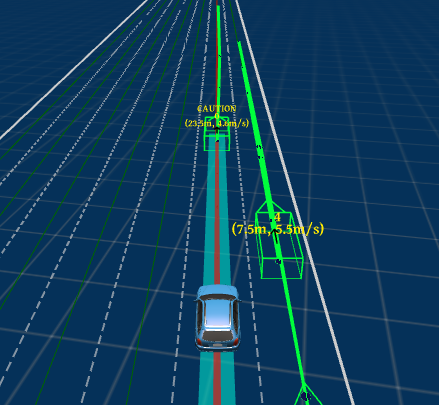
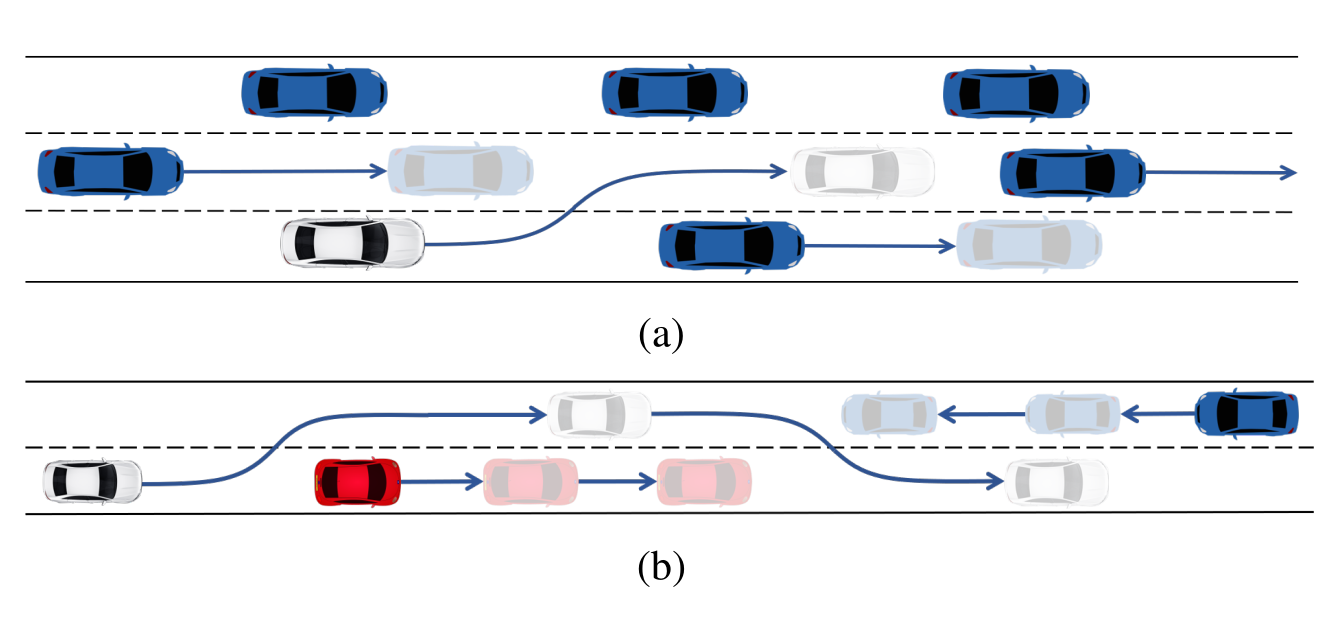
In autonomous driving, maneuver planning is essential for ride safety and comfort, involving both motion planning and decision-making. This paper introduces FFStreams, a novel approach combining high-level decision-making and low-level motion planning to solve maneuver planning problems while considering kinematic constraints. Addressed as an integrated Task and Motion Planning (TAMP) problem in a dynamic environment, the planner utilizes PDDL, incorporates Streams, and employs Fast-Forward heuristic search. Evaluated against baseline methods in challenging overtaking and lane-changing scenarios, FFStreams demonstrates superior performance, highlighting its potential for real-world applications.
@article{Jamal2024,title={FFStreams: Fast Search with Streams for Autonomous Maneuver Planning},volume={9},url={https://ieeexplore.ieee.org/document/10552884},doi={10.1109/LRA.2024.3412633},pages={6752--6759},number={7},journal={IEEE Robotics and Automation Letters},author={Jamal, Mais and Panov, Aleksandr},year={2024},}
FFStreams++_Predict
Maneuver Decision-Making with Trajectory Streams Prediction for Autonomous Vehicles
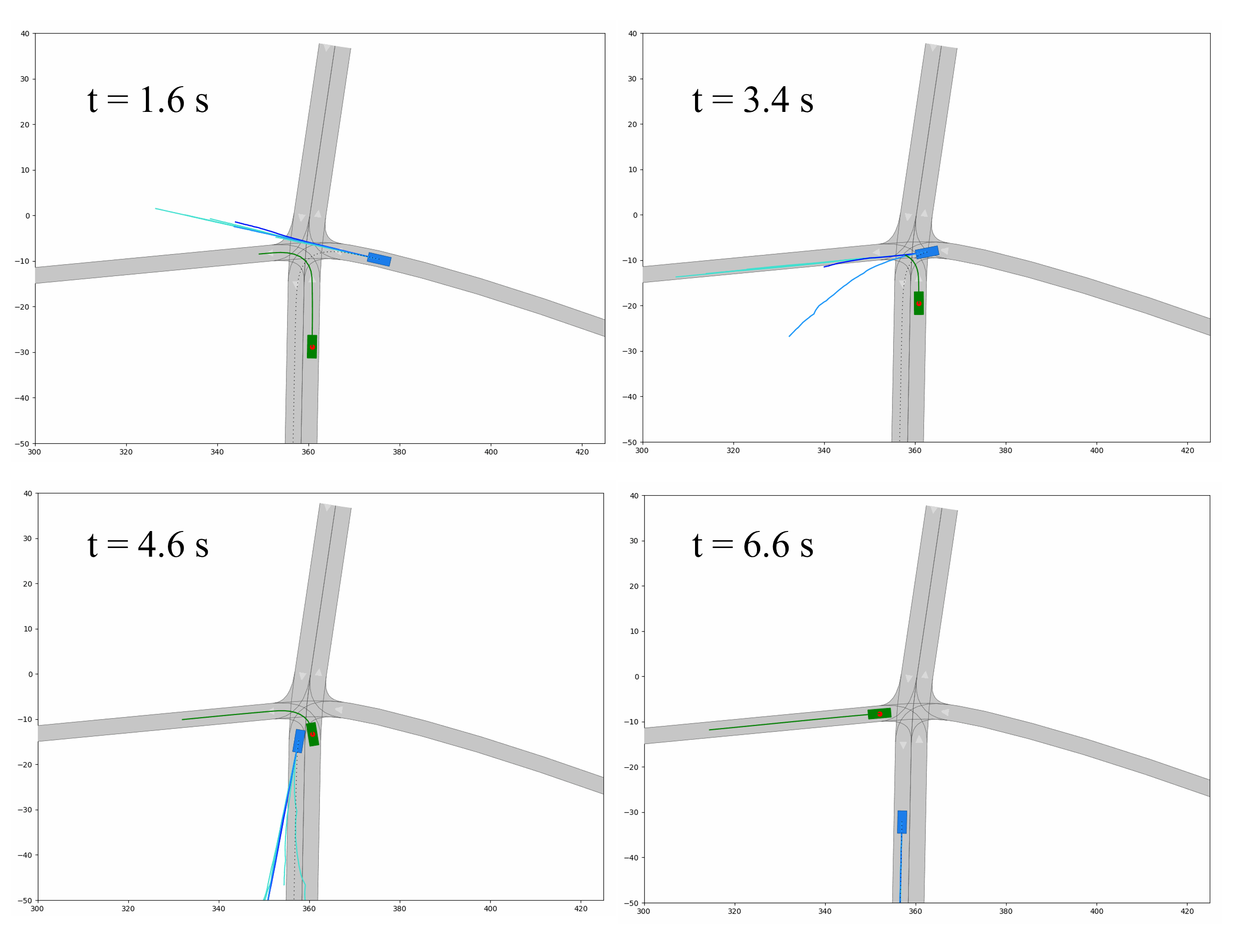
Decision-making, motion planning, and trajectory prediction are crucial in autonomous driving systems. By accurately forecasting the movements of other road users, the decision-making capabilities of the autonomous system can be enhanced, making it more effective in responding to dynamic and unpredictable environments and more adaptive to diverse road scenarios. This paper presents the FFStreams++ approach for decision-making and motion planning of different maneuvers, including unprotected left turn, overtaking, and keep-lane. FFStreams++ is a combination of sampling-based and search-based approaches, where iteratively new sampled trajectories for different maneuvers are generated and optimized, and afterward, a heuristic search planner is called, searching for an optimal plan. We model the autonomous diving system in the Planning Domain Definition Language (PDDL) and search for the optimal plan using a heuristic Fast-Forward planner. In this approach, the initial state of the problem is modified iteratively through streams, which will generate maneuver-specific trajectory candidates, increasing the iterating level until an optimal plan is found. FFStreams++ integrates a query-connected network model for predicting possible future trajectories for each surrounding obstacle along with their probabilities. The proposed approach was tested on the CommonRoad simulation framework. We use a collection of randomly generated driving scenarios for overtaking and unprotected left turns at intersections to evaluate the FFStreams++ planner. The test results confirmed that the proposed approach can effectively execute various maneuvers to ensure safety and reduce the risk of collisions with nearby traffic agents.
@article{jamal2024maneuver,title={Maneuver Decision-Making with Trajectory Streams Prediction for Autonomous Vehicles},author={Jamal, Mais and Panov, Aleksandr},year={2024},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2409.10165},}
Robotics needs more women — as researchers, engineers, and leaders.