Mais Jamal
Behavior Planning Engineer for Autonomous Systems, Moscow, Russia.

I am drawn to the moment when a machine must decide under uncertainty — not with perfect information, but with good enough reasoning to act safely. That tension between completeness and real-time feasibility has shaped everything I have built.
Professionally, I am a Behavior Planning and Autonomy Engineer with a Ph.D. in Artificial Intelligence and Machine Learning from the Moscow Institute of Physics and Technology (MIPT), focused on adaptive planning and real-time decision-making under safety constraints. My work centers on enabling machines not only to execute predefined actions, but to anticipate, adapt, and reason in dynamic environments.
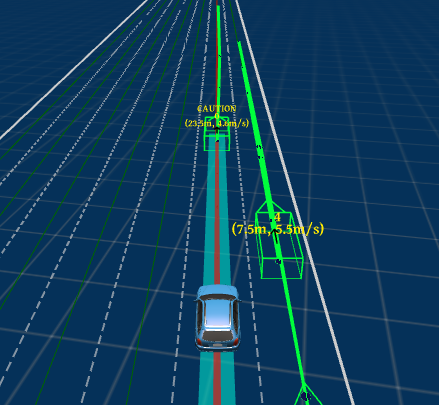
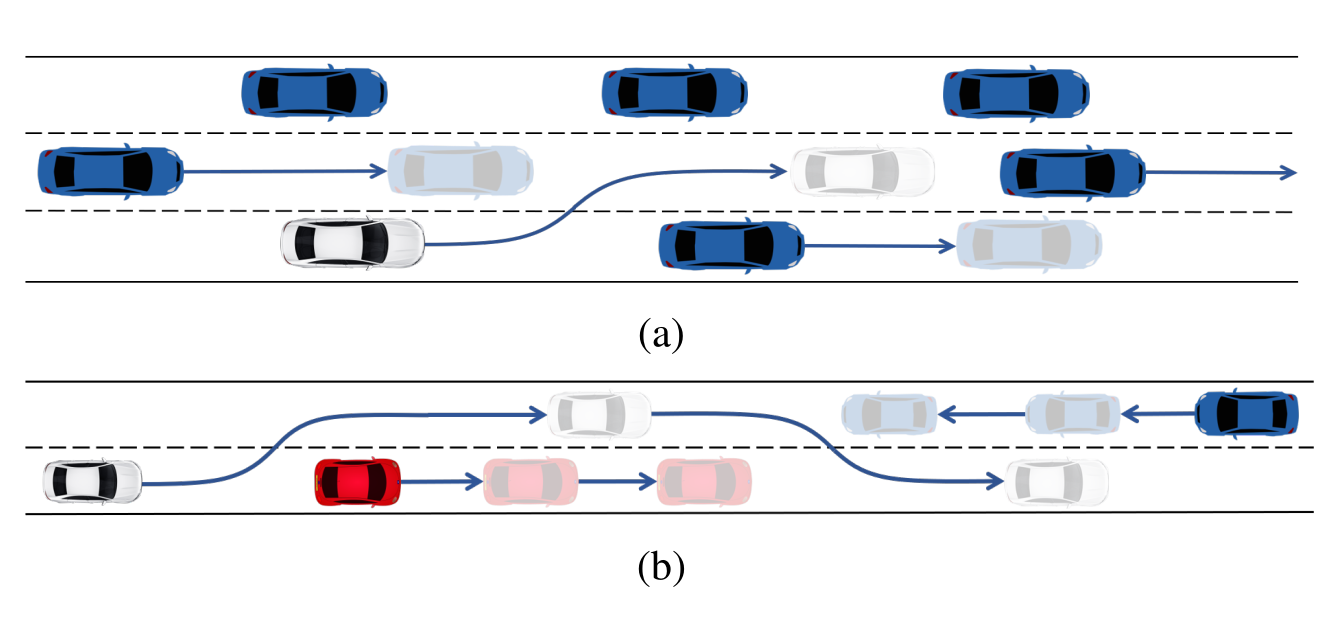
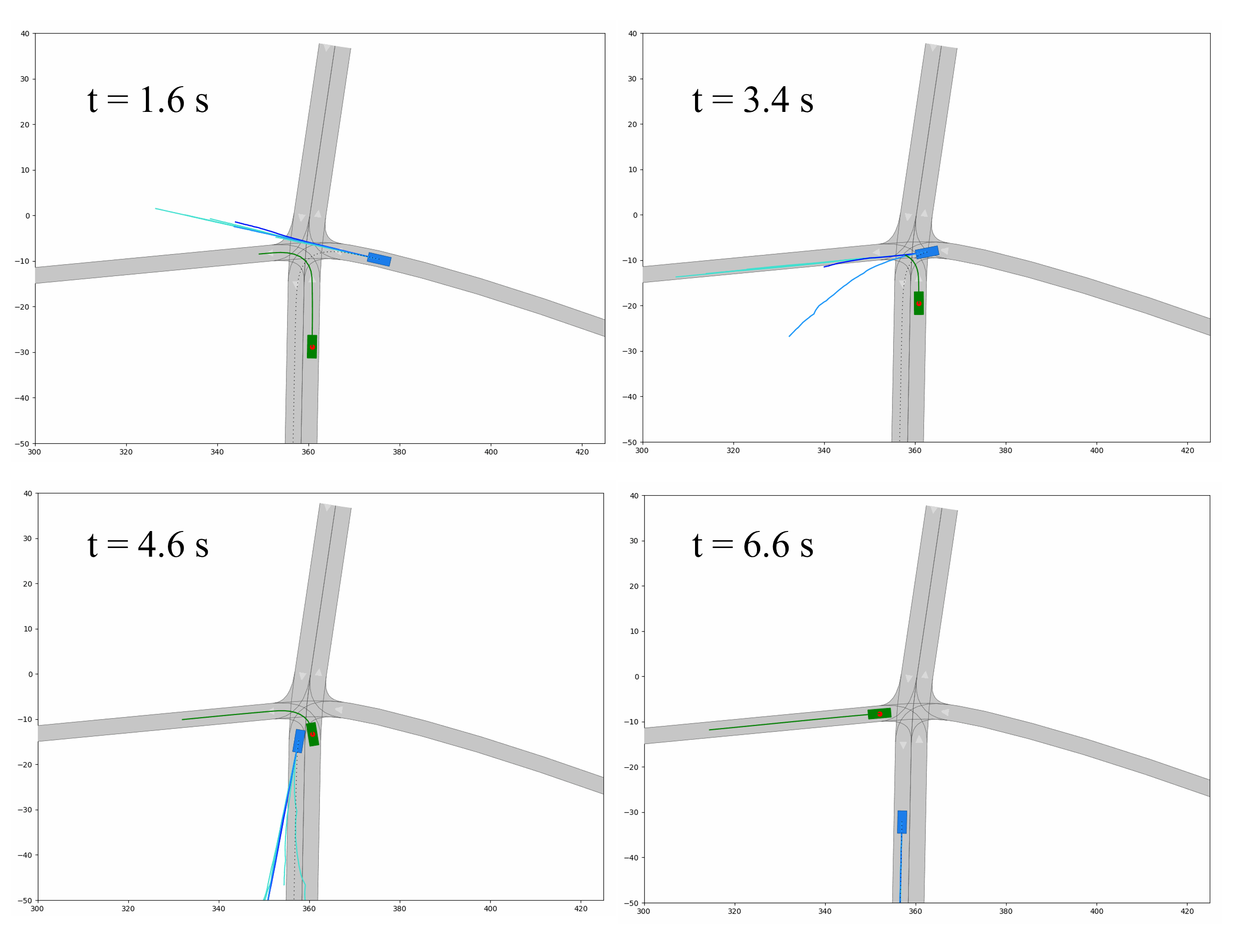
My doctoral research resulted in a task-and-motion planning (TAMP) framework extended with QCNet-based multi-agent trajectory prediction, enabling prediction-aware behavior planning in complex, uncertain settings. I design decision-making architectures that integrate planning, perception, and execution, with an emphasis on robustness and real-world feasibility.
I have developed and deployed behavior planning algorithms (behavior trees, reinforcement learning, and heuristic search) for autonomous robotic platforms, including an outdoor autonomous cleaning robot operating in unstructured environments. To support end-to-end validation, I implemented a bidirectional interface between the CARLA simulator and the Apollo Auto platform, enabling seamless transitions from simulation to hardware-in-the-loop testing and full-scale vehicle deployment. My technical expertise includes ROS/ROS2, navigation stack development, system-level integration, and full autonomy pipelines from algorithm design to field validation.
With academic training spanning learning-based robotic manipulation (M.Sc., Mechatronics and Robotic Systems, Bauman Moscow State Technical University) and autonomous aerial systems (B.Sc., Mechatronics, Robotics, and Automation Engineering, Tishreen University), I bring a comprehensive background across ground and aerial robotics. I am particularly motivated by advancing intelligent autonomy in safety-critical, real-world applications where adaptive decision-making and system reliability are essential.
Outside of research, I find myself tracing origins; how languages diverged from ancient roots, how civilizations built and lost knowledge, and how human understanding of science and engineering has transformed across time.
Robotics needs more women — as researchers, engineers, and leaders.
Currently
- 🔍 Exploring how prediction uncertainty should propagate into PDDL-based planners
- 🤞 Preparing to relocate to Europe to work on autonomous systems
- ⏳ Learning German — just getting started
News
| Nov 01, 2025 | My paper, “Принятие решений о проведении маневра с предсказанием траекторных потоков для беспилотного транспортного средства” (“Maneuver Decision-Making with Trajectory Streams Prediction for Autonomous Vehicles”), has been published in the proceedings of the XXII Russian Conference on Artificial Intelligence (RCAI-2025), held on October 6–10, 2025. |
|---|---|
| Dec 16, 2024 | I defended my doctoral thesis entitled “Development and Research of Adaptive Planning Algorithms and Methods for Autonomous Vehicle Maneuvers.” |