Mais Jamal
مهندسة تخطيط السلوك للأنظمة المستقلة، موسكو، روسيا.

دكتوراه في الذكاء الاصطناعي وتعلّم الآلة
مهندسة روبوتات وتخطيط السلوك للأنظمة المستقلة حاصلة على درجة الدكتوراه في الذكاء الاصطناعي وتعلّم الآلة من معهد موسكو للفيزياء والتكنولوجيا (MIPT)، متخصصة في التخطيط التكيّفي واتخاذ القرارات في الزمن الحقيقي ضمن قيود السلامة. يتمحور عملي حول تمكين الآلات ليس فقط من تنفيذ إجراءات محددة مسبقاً، بل من التوقّع والتكيّف والاستدلال في البيئات الديناميكية.
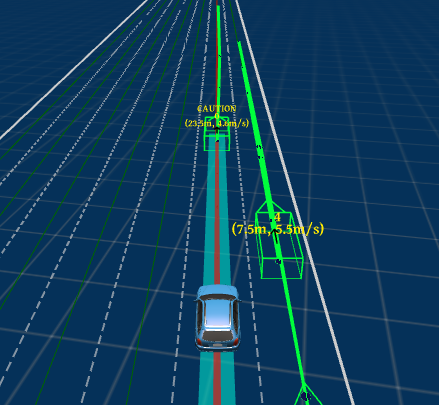
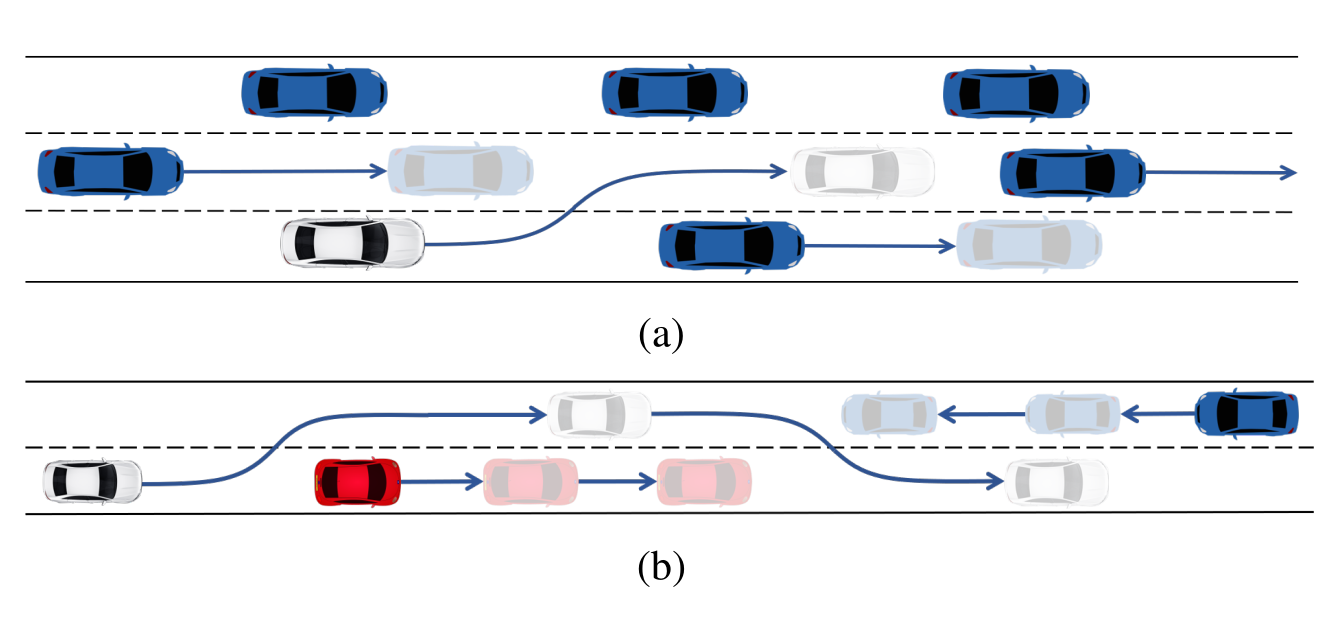
أسفر بحثي في الدكتوراه عن تصميم framework لتخطيط مسار وسلوك السيارة ذاتية القيادة عبر تخطيط المهام والحركة (TAMP) مُعزَّز بنموذج QCNet للتنبؤ بمسارات العوائق المتحركة (السيارات المحيطة)، مما يتيح تخطيط السلوك الواعي بالتنبؤات في بيئات معقدة وغير متوقعة. أصمّم بنى اتخاذ القرار التي تدمج التخطيط والإدراك والتنفيذ، مع التركيز على الجدوى في العالم الحقيقي.
قمتُ بتطوير ونشر مقالات علمية حول خوارزميات تخطيط السلوك (أشجار السلوك، التعلم المعزز RL ، والبحث الاستدلالي) لمنصات روبوتية مستقلة، بما في ذلك روبوت تنظيف خارجي مستقل يعمل في بيئات غير متوقعة. لدعم التحقق من البداية إلى النهاية، نفّذتُ واجهة ثنائية الاتجاه بين محاكي CARLA ومنصة Apollo Auto، مما يتيح الانتقال السلس من المحاكاة إلى الاختبار على مركبات حقيقية. تشمل خبرتي التقنية ROS/ROS2، وتطوير حزمة الملاحة، وتضمين الخوارزمية في النظام الروبوتي، من تصميم الخوارزميات إلى التحقق العملي.
بخلفية أكاديمية تمتد من الالتقاط باستخدام ذراع الروبوت القائم على التعلّم (ماجستير، أنظمة الميكاترونيكس والروبوتات، جامعة باومان موسكو التقنية الحكومية) والطائرة رباعية المراوح ذاتية القيادة (بكالوريوس، هندسة الميكاترونيكس والروبوتات والأتمتة، جامعة تشرين) إلى تخطيط سلوك السيارة ذاتية القيادة، لدي خبرة شاملة تغطي الروبوتات الأرضية المتنقلة والجوية. أطمح لتطوير أنظمة ذاتية القيادة(مستقلة) في التطبيقات العملية للروبوتات المتنقلة حيث يكون اتخاذ القرار التكيّفي وموثوقية النظام أمراً ضرورياً.
الأخبار
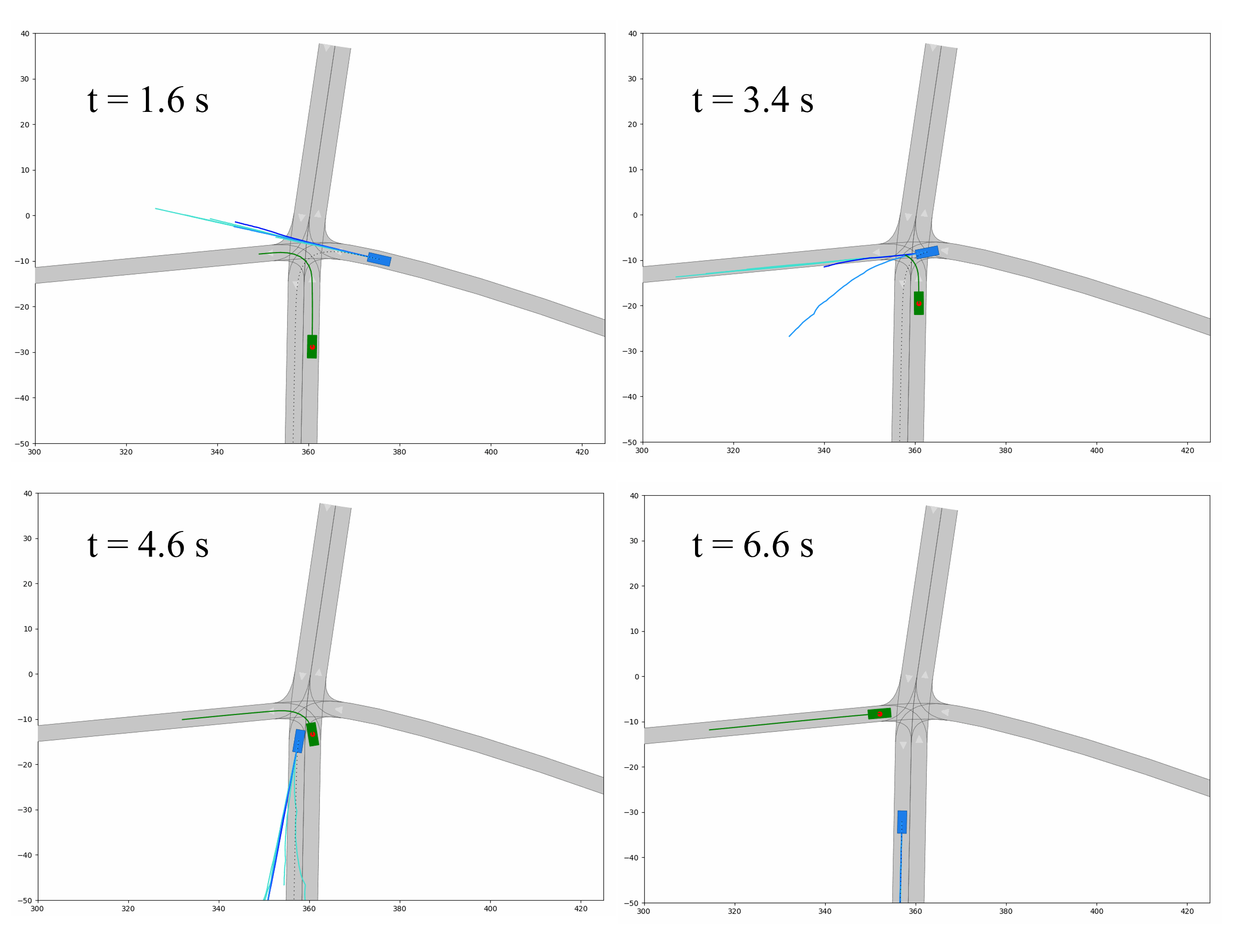
| Nov 01, 2025 | تم نشر ورقتي البحثية “Принятие решений о проведении маневра с предсказанием траекторных потоков для беспилотного транспортного средства” (“Maneuver Decision-Making with Trajectory Streams Prediction for Autonomous Vehicles”) في وقائع المؤتمر الروسي الثاني والعشرين للذكاء الاصطناعي (RCAI-2025)، المنعقد في الفترة من 6 إلى 10 أكتوبر 2025. |
|---|---|
| Dec 16, 2024 | قمتُ بالدفاع عن أطروحة الدكتوراه بعنوان “تطوير وبحث خوارزميات وطرق التخطيط التكيّفي لمناروات السيارة ذاتية القيادة “ |