Принятие решений, планирование движения и прогнозирование траекторий - ключевые компоненты систем автономного вождения. В данной статье представлен алгоритм FFStreams++, реализующий гибридную систему принятия решений и планирования движения, которая объединяет генерацию траектории на основе выборки с эвристическим поиском. Такие маневры, как незащищенные левые повороты, обгоны и удержание полосы движения, моделируются с помощью доменного языка Planning Domain Definition Language (PDDL) и генерируются с помощью планировщика Fast-Forward. Предложенная система итеративно уточняет начальное состояние с помощью потоков траекторий, специфичных для конкретного маневра, пока не будет найден оптимальный план. FFStreams++ включает в себя нейросетевой аппроксиматор для предсказания траекторий окружающих препятствий с соответствующими вероятностями. Оценка работоспособности предложенного алгоритма проведена на бенчмарке CommonRoad и демонстрирует эффективность планировщика в выполнении сложных маневров при удовлетворении требований по безопасности маневров.
@inproceedings{russianFFStreams++,author={Jamal, Mais and Panov, Aleksandr},title={Принятие решений о проведении маневра с предсказанием траекторных потоков для беспилотного транспортного средства},booktitle={Proceedings of the XXII Russian Conference on Artificial Intelligence (RCAI-2025)},year={2025},doi={10.15622/rcai.2025.056},url={https://raai.org/nextcloud/s/C3S9dqGj3pF5dsc}}
2024
FFStreams_RAL
FFStreams: Fast Search with Streams for Autonomous Maneuver Planning
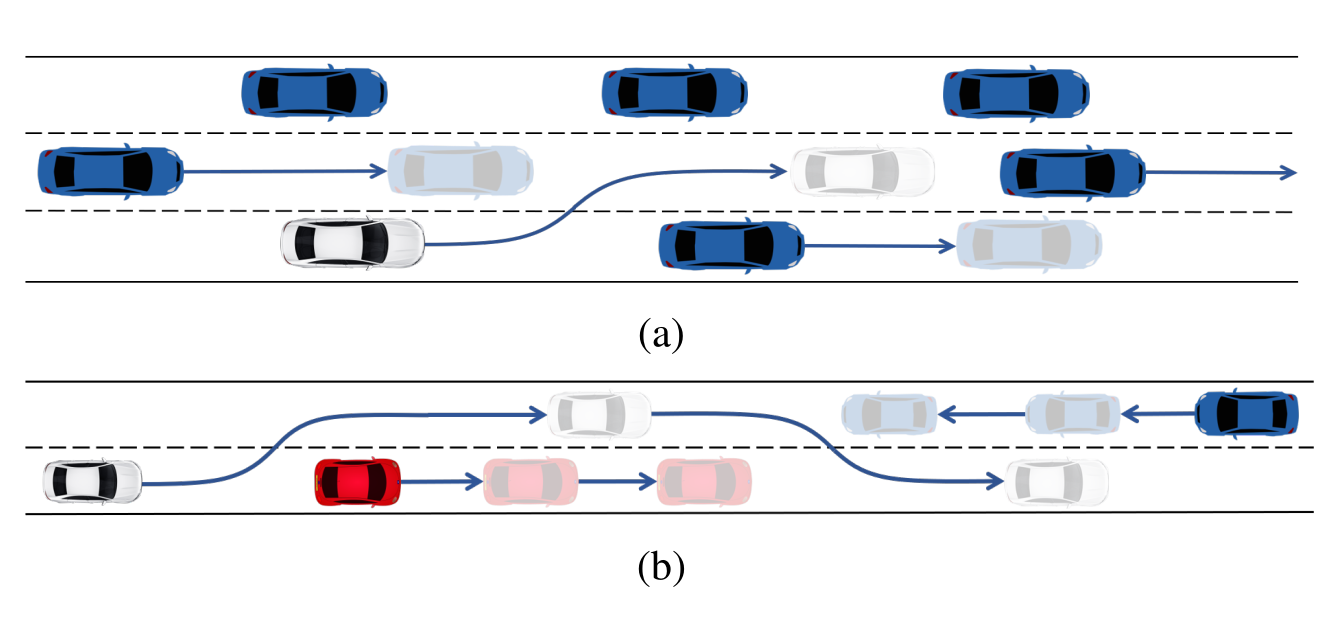
In autonomous driving, maneuver planning is essential for ride safety and comfort, involving both motion planning and decision-making. This paper introduces FFStreams, a novel approach combining high-level decision-making and low-level motion planning to solve maneuver planning problems while considering kinematic constraints. Addressed as an integrated Task and Motion Planning (TAMP) problem in a dynamic environment, the planner utilizes PDDL, incorporates Streams, and employs Fast-Forward heuristic search. Evaluated against baseline methods in challenging overtaking and lane-changing scenarios, FFStreams demonstrates superior performance, highlighting its potential for real-world applications.
@article{Jamal2024,title={FFStreams: Fast Search with Streams for Autonomous Maneuver Planning},volume={9},url={https://ieeexplore.ieee.org/document/10552884},doi={10.1109/LRA.2024.3412633},pages={6752--6759},number={7},journal={IEEE Robotics and Automation Letters},author={Jamal, Mais and Panov, Aleksandr},year={2024},}
FFStreams++_Predict
Maneuver Decision-Making with Trajectory Streams Prediction for Autonomous Vehicles
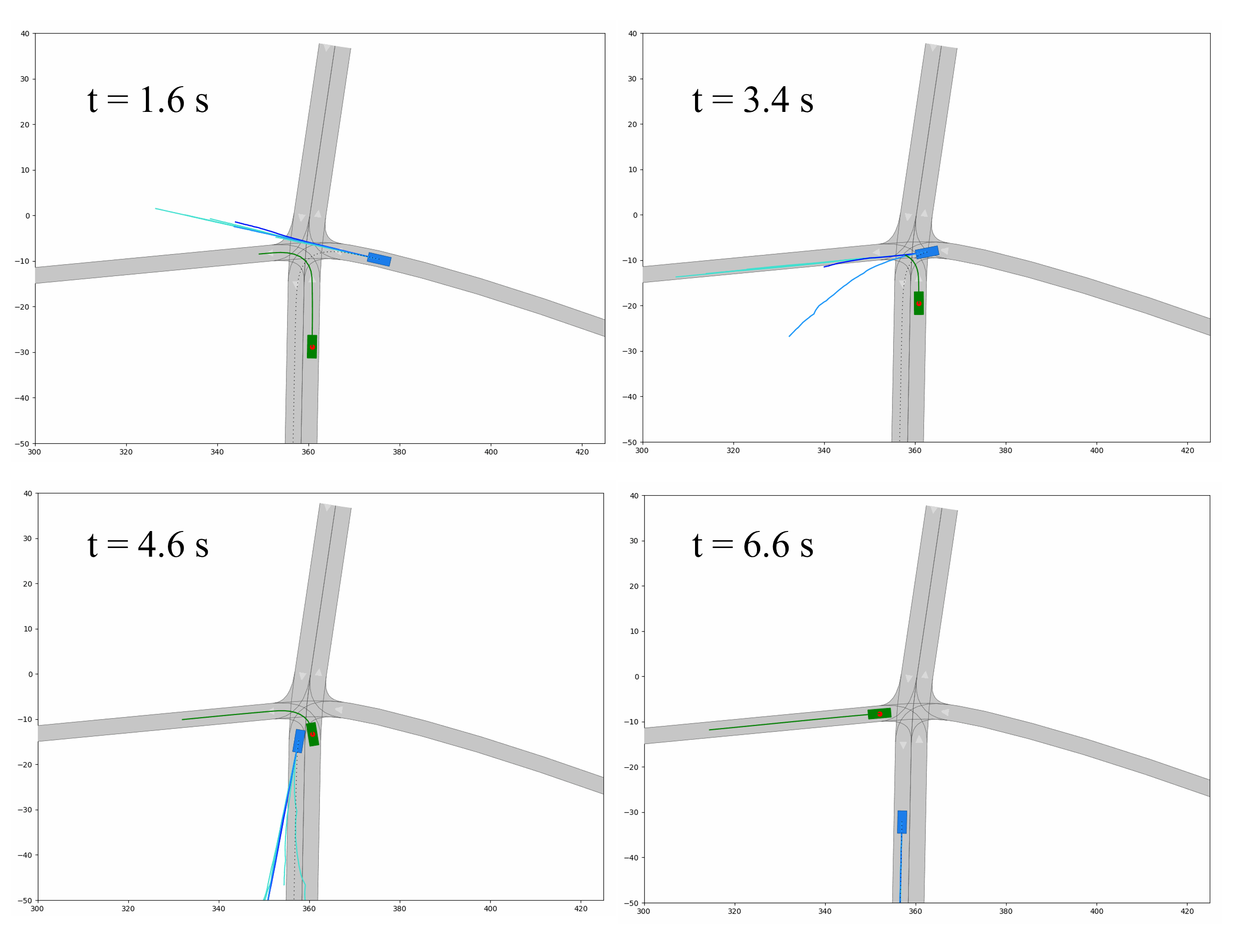
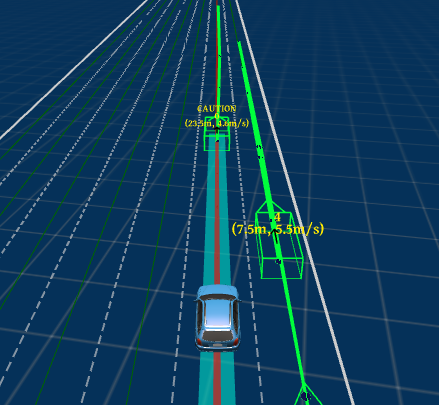
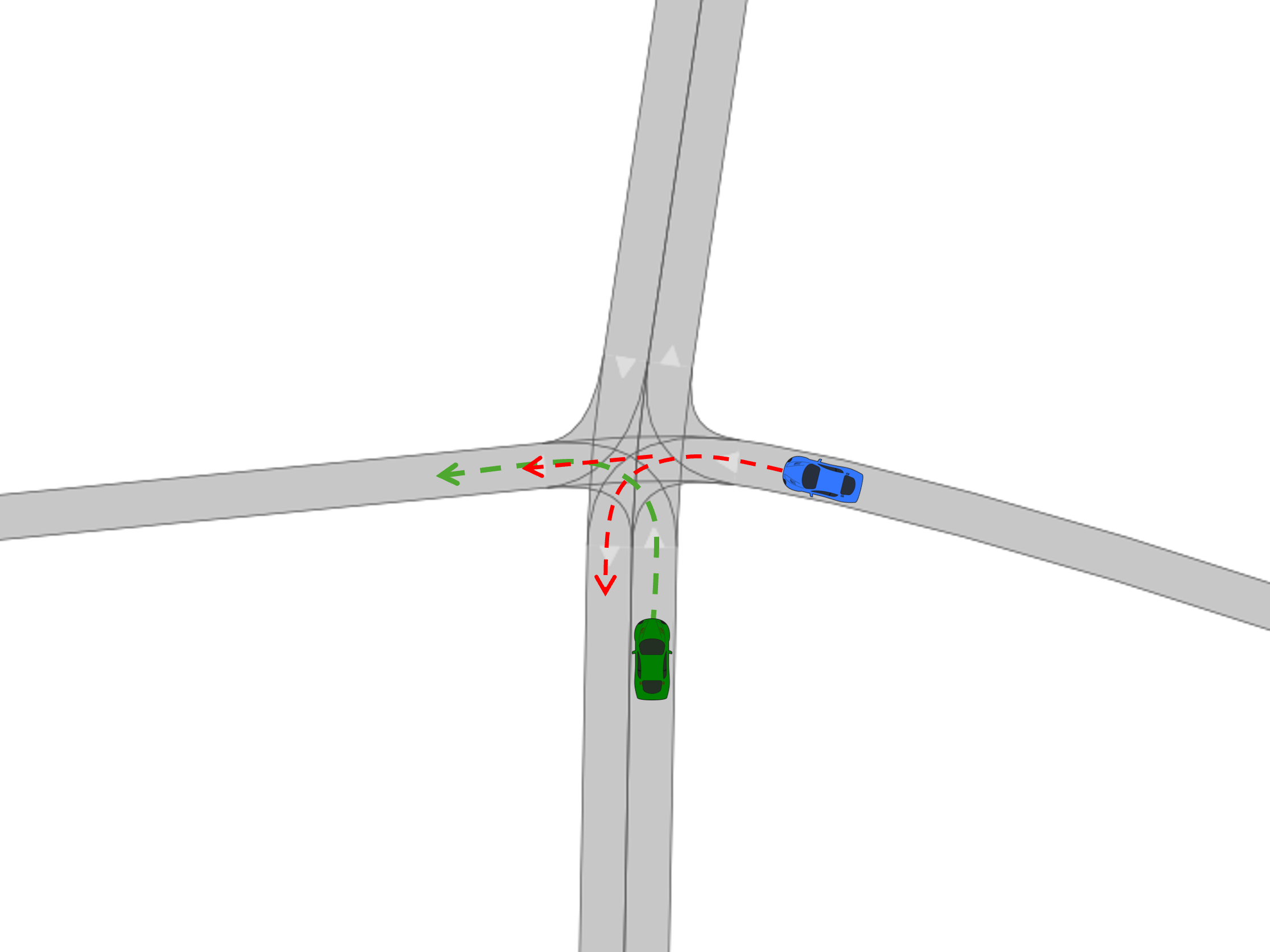
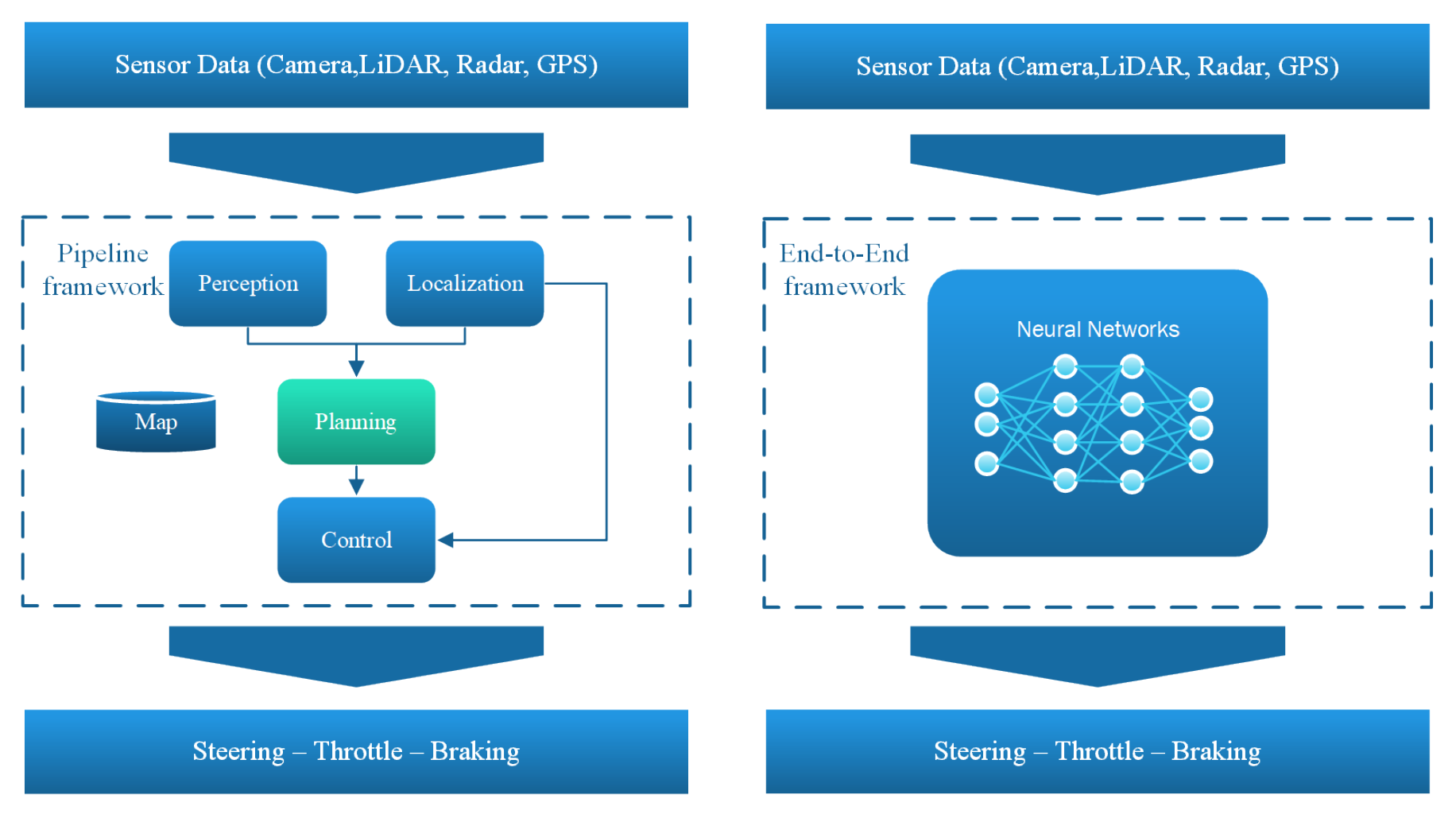
Decision-making, motion planning, and trajectory prediction are crucial in autonomous driving systems. By accurately forecasting the movements of other road users, the decision-making capabilities of the autonomous system can be enhanced, making it more effective in responding to dynamic and unpredictable environments and more adaptive to diverse road scenarios. This paper presents the FFStreams++ approach for decision-making and motion planning of different maneuvers, including unprotected left turn, overtaking, and keep-lane. FFStreams++ is a combination of sampling-based and search-based approaches, where iteratively new sampled trajectories for different maneuvers are generated and optimized, and afterward, a heuristic search planner is called, searching for an optimal plan. We model the autonomous diving system in the Planning Domain Definition Language (PDDL) and search for the optimal plan using a heuristic Fast-Forward planner. In this approach, the initial state of the problem is modified iteratively through streams, which will generate maneuver-specific trajectory candidates, increasing the iterating level until an optimal plan is found. FFStreams++ integrates a query-connected network model for predicting possible future trajectories for each surrounding obstacle along with their probabilities. The proposed approach was tested on the CommonRoad simulation framework. We use a collection of randomly generated driving scenarios for overtaking and unprotected left turns at intersections to evaluate the FFStreams++ planner. The test results confirmed that the proposed approach can effectively execute various maneuvers to ensure safety and reduce the risk of collisions with nearby traffic agents.
@article{jamal2024maneuver,title={Maneuver Decision-Making with Trajectory Streams Prediction for Autonomous Vehicles},author={Jamal, Mais and Panov, Aleksandr},year={2024},archiveprefix={arXiv},primaryclass={cs.RO},url={https://arxiv.org/abs/2409.10165},}
PhD_Dissertation
Разработка и исследование методов и алгоритмов адаптивного планирования маневров беспилотного автомобиля
Маис Жамал
2024
PhD dissertation, Moscow Institute of Physics and Technology (National Research University), English title: Development and Research of Adaptive Planning Algorithms and Methods for Autonomous Vehicle Maneuvers.
@phdthesis{Jamal2024PhD,author={Жамал, Маис},title={Разработка и исследование методов и алгоритмов адаптивного планирования маневров беспилотного автомобиля},school={Московский физико-технический институт (национальный исследовательский университет)},address={Долгопрудный, Российская Федерация},year={2024},type={Диссертация на соискание ученой степени кандидата технических наук},pages={139},language={russian},note={PhD dissertation, Moscow Institute of Physics and Technology (National Research University), English title: Development and Research of Adaptive Planning Algorithms and Methods for Autonomous Vehicle Maneuvers.}}
2023
RL_Parking
Learning Adaptive Parking Maneuvers for Self-driving Cars
Gregory Gorbov, Mais Jamal, and Aleksandr I. Panov
In Proceedings of the Sixth International Scientific Conference “Intelligent Information Technologies for Industry” (IITI’22), 2023
This paper addresses the autonomous parking for a vehicle in environments with static and dynamic obstacles. Although parking maneuvering has reached the level of fully automated valet parking, there are still many challenges to realize the parking motion planning in the presence of dynamic obstacles. One of the most famous autonomous driving platforms is the Baidu Apollo platform. In the Apollo platform, this problem is solved using the classic method hybrid A*. However, this method has two main downsides. Firstly, it generates in some parking scenarios, trajectories that consist of many partitions with different gear types and sizes. Such trajectories are intractable by a self-driving car when testing the Apollo planner on more realistic data coming from a simulator such as SVL. Secondly, the built-in algorithm does not have the ability to interact with dynamic obstacles, which might lead to a collision in some critical parking scenarios. To overcome these issues, we proposed a method based on reinforcement learning, which uses the RL-policy (from POLAMP) allowing us to take into account the kinematic constraints of the vehicle, static and dynamic obstacles. The proposed method was fully integrated into the Apollo platform with developed Cyber RT nodes, which were used for publishing the parking trajectory from our algorithm to the SVL simulator through a ROS/Cyber bridge. The final model demonstrates transferability to the previously unseen experimental environments and flexibility with respect to built-in hybrid A*.
@inproceedings{10.1007/978-3-031-19620-1_27,author={Gorbov, Gregory and Jamal, Mais and Panov, Aleksandr I.},editor={Kovalev, Sergey and Sukhanov, Andrey and Akperov, Imran and Ozdemir, Sebnem},doi={10.1007/978-3-031-19620-1_27},title={Learning Adaptive Parking Maneuvers for Self-driving Cars},booktitle={Proceedings of the Sixth International Scientific Conference ``Intelligent Information Technologies for Industry'' (IITI'22)},year={2023},publisher={Springer International Publishing},address={Cham},pages={283--292},isbn={978-3-031-19620-1},url={https://link.springer.com/chapter/10.1007/978-3-031-19620-1_27},}
2021
AdaptBehaviorTree
Adaptive maneuver planning for autonomous vehicles using behavior tree on apollo platform
In safety-critical systems such as autonomous driving systems, behavior planning is a significant challenge. The presence of numerous dynamic obstacles makes the driving environment unpredictable. The planning algorithm should be safe, reactive, and adaptable to environmental changes. The paper presents an adaptive maneuver planning algorithm based on an evolving behavior tree created with genetic programming. In addition, we make a technical contribution to the Baidu Apollo autonomous driving platform, allowing the platform to test and develop overtaking maneuver planning algorithms.
@inproceedings{jamal2021adaptive,title={Adaptive maneuver planning for autonomous vehicles using behavior tree on apollo platform},author={Jamal, Mais and Panov, Aleksandr},booktitle={Artificial Intelligence XXXVIII},publisher={Springer, Cham},address={Cham},volume={13101},pages={327--340},year={2021},isbn={978-3-030-91100-3},doi={10.1007/978-3-030-91100-3_26},url={https://link.springer.com/chapter/10.1007/978-3-030-91100-3_26},}
2020
Robotic_grasping
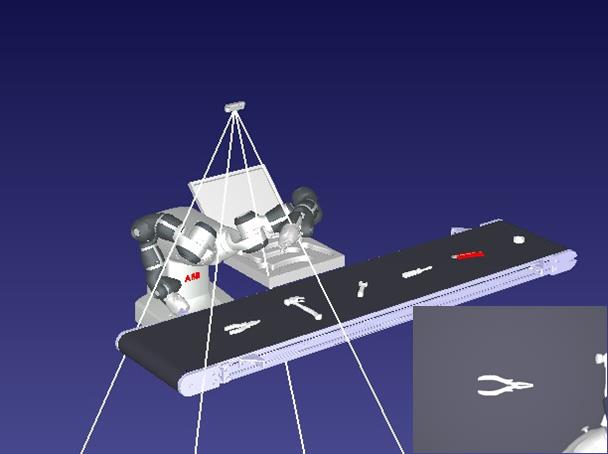
The Use of Convolutional Neural Networks for Training the Manipulation Robot to Capture Objects
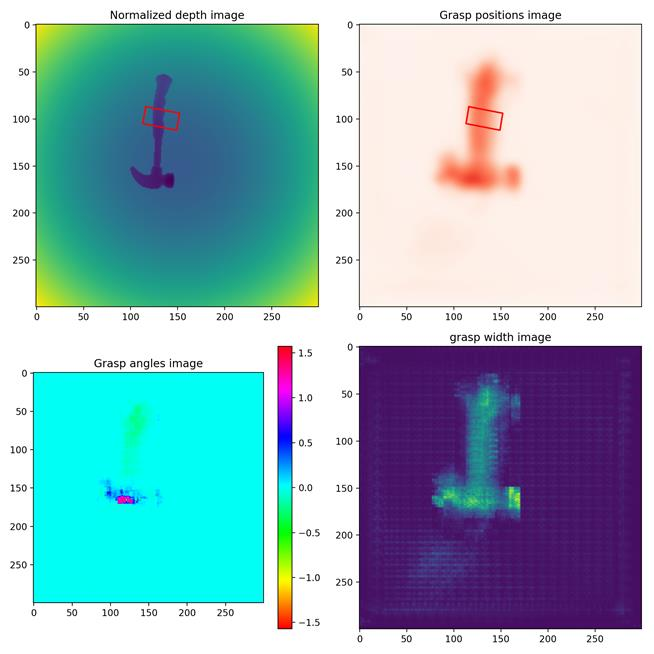
The capture of various objects is the main task performed by the robot in the study and manipulation in the environment. Given the significant difficulties associated with programming the necessary capture position for each of the objects, it is proposed to use a convolutional neural network to train the robot to capture various objects, taking into account their spatial position. The network was trained using a sample of 800 images of 20 objects. An experimental study showed that the network provides 53.04% success in capturing new objects that were not in the training set. This suggests that with an increase in the training sample, the robot will be able to successfully capture objects that meet certain conditions and are not in the training sample
@article{Jamal2020CNNRobot,author={Jamal, Mais},title={The Use of Convolutional Neural Networks for Training the Manipulation Robot to Capture Objects},journal={Politechnical Student Journal},year={2020},doi={10.18698/2541-8009-2020-01-571},number={01},publisher={Bauman Moscow State Technical University},address={Moscow, Russian Federation},note={Bauman Moscow State Technical University},url={https://ptsj.bmstu.ru/catalog/menms/robots/571.html},keywords={robot, manipulator, capture operation, neural network, convolutional neural network, machine learning, artificial intelligence},}
Master_Thesis
Применение нейронных сетей для обучения манипуляционного робота операции захвата объектов
Маис Жамал
2020
Master thesis, Bauman Moscow State Technical University, English title: Application of neural networks for training a manipulation robot to perform object grasping operations
@mastersthesis{Jamal2020Thesis,author={Жамал, Маис},title={Применение нейронных сетей для обучения манипуляционного робота операции захвата объектов},school={Московский государственный технический университет имени Н.Э. Баумана (национальный исследовательский университет)},address={Moscow, Russian Federation},year={2020},type={Master thesis, Bauman Moscow State Technical University},pages={73},language={russian},note={Master thesis, Bauman Moscow State Technical University, English title: Application of neural networks for training a manipulation robot to perform object grasping operations}}
2019
Quadcopter
Low-Cost Quadcopter Indoor Positioning System Based on Image Processing and Neural Networks
I. Hatem, M. Jamal, Y. Murhij, and 1 more author
In Mechanism, Machine, Robotics and Mechatronics Sciences, 2019
Quadcopter positioning in indoor environments is considered a major problem because of the difficulty of estimating a reliable position. Moreover, the positioning system is expected to work in real-time and to be accurate and cost-effective. In this paper, a combination of image processing techniques and neural networks is proposed to obtain the quadcopter position along the X, Y and Z coordinates. Three neural networks were used, one for each dimension. The proposed neural network based technique estimates the quadcopter target position along X, Y, and Z from two image points extracted from images captured by two low-cost IP cameras. The offered positioning system has been implemented on a locally designed and assembled quadcopter. Hovering experiments on the quadcopter have been performed in an indoor lab based environment. The results show that combining image processing techniques with neural network-based method achieves a low-cost accurate positioning system within a precision of a few centimeters with a frequency of 16 Hz.
@inproceedings{10.1007/978-3-319-89911-4_18,author={Hatem, I. and Jamal, M. and Murhij, Y. and Ali, Z.},editor={Rizk, Rany and Awad, Mariette},title={Low-Cost Quadcopter Indoor Positioning System Based on Image Processing and Neural Networks},booktitle={Mechanism, Machine, Robotics and Mechatronics Sciences},year={2019},publisher={Springer International Publishing},address={Cham},pages={243--257},isbn={978-3-319-89911-4},url={https://link.springer.com/chapter/10.1007/978-3-319-89911-4_18},doi={10.1007/978-3-319-89911-4_18},}
 Разработка и исследование методов и алгоритмов адаптивного планирования маневров беспилотного автомобиля2024PhD dissertation, Moscow Institute of Physics and Technology (National Research University), English title: Development and Research of Adaptive Planning Algorithms and Methods for Autonomous Vehicle Maneuvers.
Разработка и исследование методов и алгоритмов адаптивного планирования маневров беспилотного автомобиля2024PhD dissertation, Moscow Institute of Physics and Technology (National Research University), English title: Development and Research of Adaptive Planning Algorithms and Methods for Autonomous Vehicle Maneuvers.